
Introduction
Note that the parts list is for all four floor modules.
Parts
-
-
Gather your parts and tools, as listed above.
-
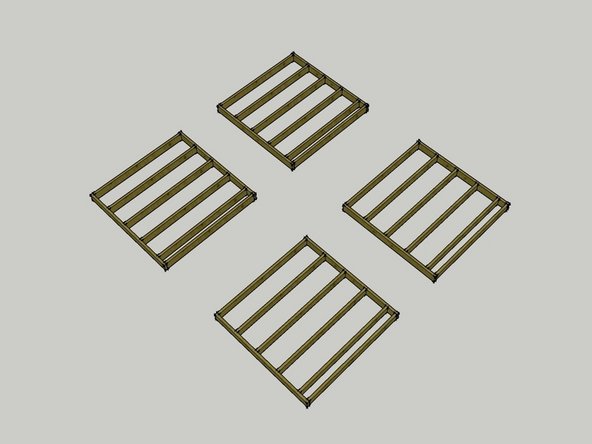
Review the image at left to understand what you are building.
-
Cut 2 of your 6' long 2X6s to 5' - 11 1/4". These make up the two long sides of your frame.
-
Cut the other 6 of your 6' long 2X6s to 5' - 8 1/4". These make up the floor joists of the frame.
-
Since you are building a total of 4 of these modules, you will need to create 4 sets of the pieces listed above.
-
-
-
Create layout marks as shown in the image on your two longer 2X6s.
-
You only need to measure and mark one of your long 2X6s. You can then use this one as a template to mark your others.
-
Since you will need to build 4 of these modules, you need to mark a total of 8 2X6s as shown in the image on the left.
-
-
-
Layout your pieces on a flat surface like a concrete slab or wooden floor deck. It helps a lot if this surface is completely level.
-
Lay your two longer pieces with the layout marks on them facing each other and lay your 6 shorter pieces in between, roughly in the position of the marks.
-
Pre-drill two holes from the outside at the ends of the board to avoid splitting as shown on the second photo of this step. (The pre-drilling is only necessary at the ends of the board, not in the middle.) Screw (or nail, if you choose) the pieces into position.
-
-
-
You have now completed four frames!
-
It is time to make MH 2 Floor Module Decking and attach it to these frames.
-



Note that above parts list is for all four floor modules.
Note that above parts list is for all four floor modules.
Cancel: I did not complete this guide.
One other person completed this guide.